
Model of a fivebar linkage Download Scientific Diagram
It can be consider as a new 5-bar spherical linkage or as a parallel mechanism. Indeed, a platform connected to a base by the mean of two serial spherical arms. Its new specific characteristics allow generating a Remote Center of Motion of two angular decoupled Degrees of Freedom. The decoupled motion is proven by its kinematic and velocity models.

Schematic view of the fivebar linkage and of a typical path to follow. Download Scientific
5 Planar Linkages 5.1 Introduction 5.1.1 What are Linkage Mechanisms? Have you ever wondered what kind of mechanism causes the wind shield wiper on the front widow of car to oscillate ( Figure 5-1a )? The mechanism, shown in Figure 5-1b , transforms the rotary motion of the motor into an oscillating motion of the windshield wiper.

Fivebar 5R spatial linkage resulting from the connection of two... Download Scientific Diagram
Interactive Five-Bar Geared Linkage Kinematic Analysis. Given the link lengths, theta1, theta2, omega2, alpha2, lambda, phi, and the coupler point vector, the interface below allows the user to find the angular positions, velocities, and accelerations of each link, along with the instantaneous position, velocity, and acceleration of the coupler.

Five bar linkage robot manipulator.... Download Scientific Diagram
The five-bar linkage with symmetrical structure consists of two rotational joints, fixed on the x axis and placed symmetric to the y axis, as shown in Fig. 1.
Specified fivebar linkage HIJGO3. Download Scientific Diagram
This Demonstration models the motion of the bicyclerider system by a fivebar planar linkage with the crank axis and the hip as fixed joints the pedal ankle and knee are moving joints If we take the foot angle as a function of the crank angle we end up with the crank angle as the only degree of freedom
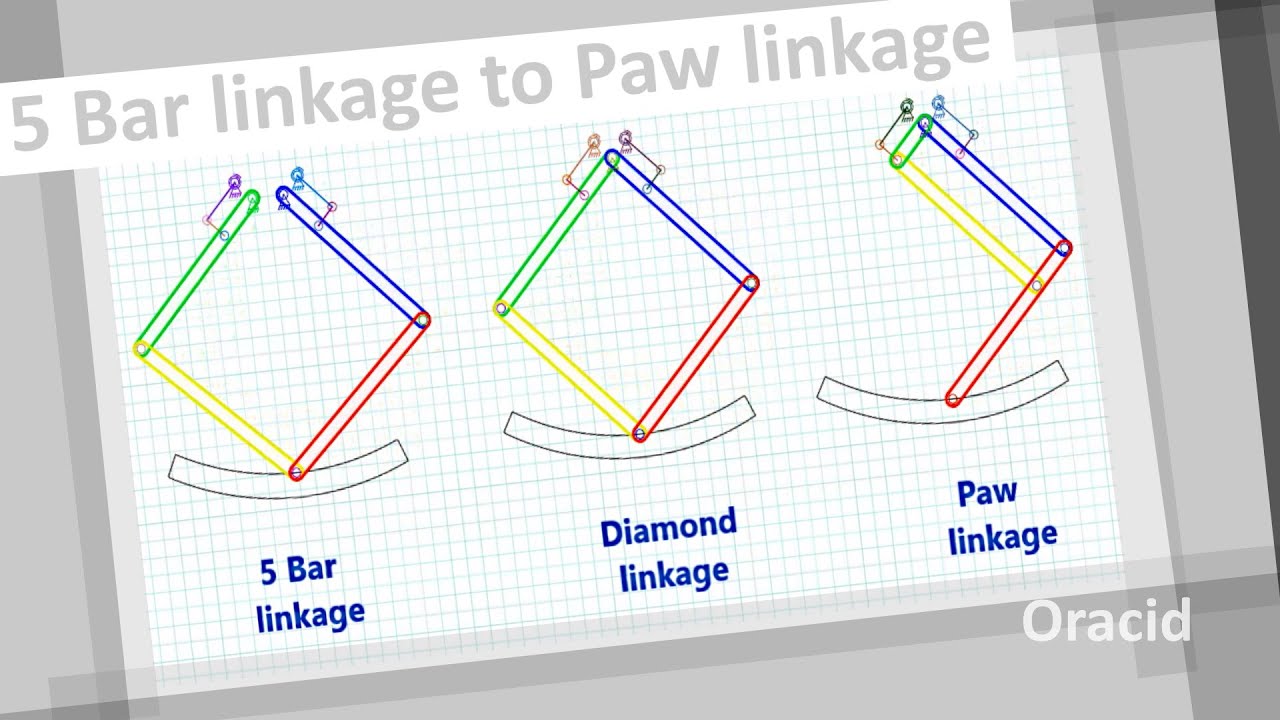
5 Bar linkage to Paw linkage YouTube
In kinematics, a five-bar linkage is a mechanism with two degrees of freedom that is constructed from five links that are connected together in a closed chain. All links are connected to each other by five joints in series forming a loop. One of the links is the ground or base. [1]
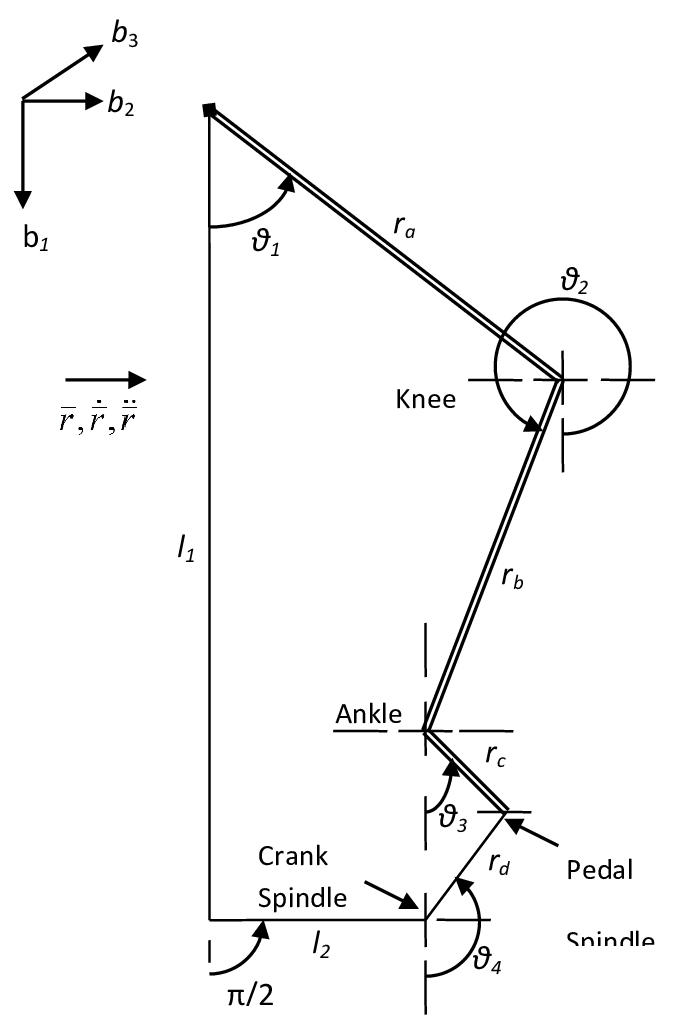
Fivebar linkages model of leg segments and bicycle frame Download Scientific Diagram
• History • Definitions • Links • Joints • Instantaneous Center of Rotation • 3-Bar Linkages • 4-Bar Linkages • 5-Bar Linkages • 6-Bar Linkages • Extending Linkages • Compliant Mechanisms • Manufacturing & Robust Design •Mechanism Mania! Peter Bailey's HyperHex™ hexapod machining center History

Model of a fivebar linkage Download Scientific Diagram
Dynamic analysis of a translating five-bar linkage mechanism Authors: Arinola Ajayi University of Lagos Adeshola Oluremi Openibo Gbeminiyi Sobamowo University of Lagos Antonio Siqueira.

5bar linkage mechanism with FreeCAD software YouTube
The 5-bar-linkage manipulator configuration is well suited to many industrial robotic applications. Aside from kinematic suitability, the dynamic equations are greatly simplified due to a decoupling of the manipulator inertia matrix. The design also lends itself to the use of direct drive motors. However, these motors must be capable of.
5 Bar Linkage Eliezar Vigdorchik
The 5-Bar Linkage (5BL) is a planar robot design that is mechanically far simpler than standard x-y gantry style planar robots. While simpler and cheaper to construct, the kinematics of the 5BL are non-linear and more complex than the gantry style.
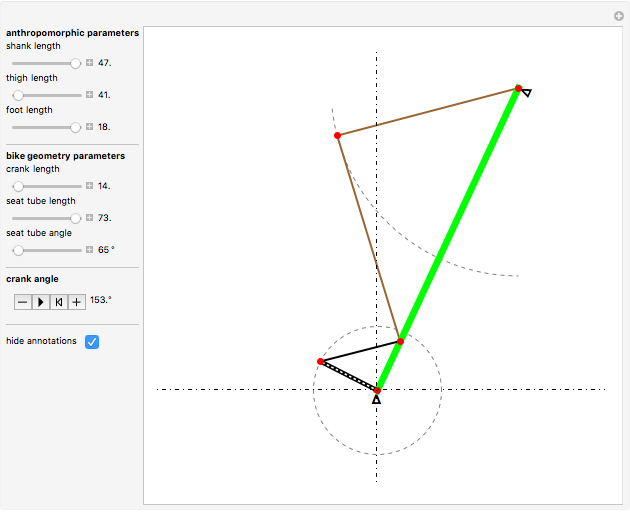
FiveBar Linkage Model of the BicycleRider System Wolfram Demonstrations Project
The 5-Bar Linkage (5BL) is a planar robot design that is mechanically far simpler than standard x-y gantry style planar robots. While simpler and cheaper to construct, the kinematics of the 5BL are non-linear and more complex than the gantry style.

Instant centers of fivebar planar linkage with one prismatic joint. Download Scientific Diagram
This paper attempts to study how a parallel robot based on 5-bar linkage works. Major issues include conceiving a 5-bar linkage, designing a 2-DOF parallel robot through workspace synthesis,.

(PDF) Dynamic analysis of a translating fivebar linkage mechanism
Join for free. Download scientific diagram | Model of a five-bar linkage from publication: Dynamics modeling and stability of robotic systems with discrete-time force control | This paper.
5 bar linkage (for quadrupedal robot) YouTube
The five-bar linkages with DoF = 2 are used in manipulators for a double SCARA robot [ 1, 2] and for an over constrained parallel manipulator for positioning the end-effector with high acceleration and positioning precision [ 3 ], in haptic devices for wearable display LinkTouch, providing force feedback at a finger pad [ 4 ], in biomechanics fo.

Spherical fivebar linkage of the palm. Download Scientific Diagram
In kinematics, a five-bar linkage is a mechanism with two degrees of freedom that is constructed from five links that are connected together in a closed chain.All links are connected to each other by five joints in series forming a loop. One of the links is the ground or base. This configuration is also called a pantograph, however, it is not to be confused with the parallelogram-copying.

a) Five bar linkage mechanism with finger b) a chosen initial... Download Scientific Diagram
Wyo. Formal challenges to Donald J. Trump's presidential candidacy have been filed in at least 34 states, according to a New York Times review of court records and other documents. Mr. Trump was.
